Разработка электронных схем
- leonvasiljew
- 21 июн. 2015 г.
- 12 мин. чтения
Разработка электронных схем начинается с изучения самих элементов, как они выглядят, из чего они состоят, а также с выбора CAD-средств для сборки. В настоящее время на рынке множество видов CAD-средств для сборки и моделирования МПУ. Как же выбрать подходящее нам CAD-средство для разработки? На рис. 6 представлена контекстная диаграмма выбора средств разработки.

Рисунок 6. IDEF3 сценарии выбора CAD-средства
У разработчика имеется список CAD-средств, которые он выбрал и нашел. Для начала разработчик проверяет на поддержку микропроцессора или микроконтроллера, т.е. те CAD-средства, которые не поддерживают выбранный микроконтроллер, сразу же отбрасываются. На следующем этапе выбора проверяется обширность элементов, которые нам необходимы на стадии сборки, и необходимый функционал. При недостаточном функционале и нехватке элементов CAD-средства тоже отбрасываются. И в конце в концов, проверка доступности. Если есть бесплатная или пробная версии, то такие CAD-средства подходят для разработки. Таким образом было выбрано CAD-средство для разработки и моделирования Proteus7 по нескольким критериям:
содержит множество электронных элементов;
функционал достаточен для нашей разработки;
поддерживает микроконтроллеры семейства Intel 8051 и ATmega328;
есть возможность моделирования устройства;
имеется бесплатная ограниченная версия.
До начала сборки электронной схемы любого микропроцессорного устройства необходимо изучить компоненты которые будете использовать.
Рассмотрим компоненты для учебного примера.
Микроконтроллер I8051
Микроконтроллер I8051 является первым микроконтроллером семейства MCS-51. Данный микроконтроллер имеет в своем составе следующие аппаратные средства:
- 8-разрядный центральный процессор, в состав которого входят однобайтное арифметико-логическое устройство и схема аппаратурной реализации команд умножения и деления;
- постоянное запоминающее устройство программ емкостью 4 Кбайта,
- оперативное запоминающее устройство данных емкостью 128 байт, используемое для организации регистровых банков, стеков и хранения пользовательских данных;
- не менее 32-х двунаправленных интерфейсных линий, индивидуально программируемых на ввод или вывод информации;
- два 16-битных таймера/счетчика, используемых для подсчета внешних событий, организации временных задержек и тактирования коммуникационного порта;
- асинхронный канал дуплексного последовательного ввода/вывода информации со скоростью до 375 кбит/сек,
- блок двухуровневого векторного прерывания от пяти источников,
- синхрогенератор, схему синхронизации и управления.
Структурная схема микроконтроллера I8051 представлена на рис. 7. Структура микроконтроллеров серии I8051 и их система команд позволяет в случае необходимости расширить функционально-логические возможности контроллеров. С использованием внешних дополнительных БИС постоянной и оперативной памяти адресное пространство микроконтроллеров может быть расширено до 64 Кбайт, а путем подключения различных интерфейсных БИС число связей микроконтроллеров с объектом управления может быть практически увеличено без ограничений.

Рисунок 7. Обобщенная структурная схема микроконтроллера I8051
На рис. 12 представлено условное графическое обозначение микроконтроллера I8051, а назначение выводов микроконтроллера дано в таблице 20. Микроконтроллеры серии I8051 требуют одного источника питания напряжением +5В, рассеивают мощность около 1,5 Вт и работают в диапазоне температур от 0 до 70 С. По входам и выходам микроконтроллеры электрически совместимы с интегральными схемами ТТЛ. Конструктивно микроконтроллеры выполняются в металлокерамическом и пластмассовых корпусах типа 2123.40 (прямоугольном корпусе с 40 контактами).
Рисунок 8. Условное графическое обозначение микроконтроллера I8051
Таблица 20. Назначение выводов микроконтроллера I8051


Семисегментный индикатор – устройство отображения цифровой информации. Это наиболее простая реализация индикатора, который может отображать арабские цифры. Для отображения букв используются более сложные многосегментные и матричные индикаторы. Семисегментный индикатор, как говорит его название, состоит из семи элементов индикации (сегментов), включающихся и выключающихся по отдельности которая приведена на рис. 13. Включая их в разных комбинациях, из них можно составить упрощённые изображения арабских цифр. Часто семисегментные индикаторы делают в курсивном начертании.
Цифры 6, 7 и 9 имеют по два разных представления на семисегментном индикаторе. В ранних калькуляторах Casio и Электроника цифра 0 отображалась в нижней половине индикатора.
Сегменты обозначаются буквами от A до G; восьмой сегмент – десятичная точка (decimal point, DP), предназначенная для отображения дробных чисел.

Рисунок 9. Условное графическое обозначение семисегментного индикатора
Матричная клавиатура
Зачастую свободных выводов микроконтроллера не хватает для подключения необходимого количества кнопок. При непосредственном соединении для n кнопок надо выделить столько же линий ввода-вывода, что не всегда возможно. Для более рационального использования линий портов можно воспользоваться матричной схемой подключения на рис. 14. В данном случае матрица, подключённая к порту D, имеет размер 4*4=16 кнопок (4 строки r0…r3 и 4 столбца с0…с3). Линии PD0…PD3, являющиеся строками r0…r3, всегда настроены на ввод, и подтянуты к шине питания резисторами R (типичный номинал 4,7…10 кОм). С них и производится считывание состояния кнопок SB1-SB16. На линиях PD4…PD7 (столбцы с0…с3) поочерёдно формируется сигнал логического нуля. Первоначально низкий уровень устанавливается на столбце с0, а на всех остальных столбцах при этом Z-состояние. Теперь только при нажатии кнопок этого столбца (SB1…SB4) на линиях строк r0…r3 может возникнуть низкий логический уровень. Далее логический 0 выставляется на столбце с1 и сканируются группа кнопок SB5…SB8 и т.д. Точно такой же алгоритм опроса кнопок применяется и для любой другой матричной клавиатуры не зависимо от числа строк и столбцов. В общем случае количество кнопок n является произведением числа строк и столбцов. Так, например, матрица 2*2 (4 линии) будет содержать 4 кнопки. Но с другой стороны столько же линий ввода-вывода понадобится и для непосредственного подключения того же числа кнопок. Таким образом, экономия выводов начинает проявляться при числе кнопок, превышающем 4…6, и становится ещё более существенной с ростом их количества.

Рисунок 10. Матричная схема подключения кнопок
Arduino UNO
Общие сведения
Arduino Uno-контроллер построен на ATmega328. Платформа имеет 14 цифровых вход/выходов (6 из которых могут использоваться как выходы ШИМ), 6 аналоговых входов, кварцевый генератор 16 МГц, разъем USB, силовой разъем, разъем ICSP и кнопку перезагрузки. Для работы необходимо подключить платформу к компьютеру посредством кабеля USB, либо подать питание при помощи адаптера AC/DC или батареи. На таблице 21 представлена характеристики контроллера Arduino Uno.
Табл. 21. Характеристики Arduino Uno.

Схема и исходные данные приведены в приложении.
Питание
Arduino Uno может получать питание через подключение USB или от внешнего источника питания. Источник питания выбирается автоматически.
Внешнее питание (не USB) может подаваться через преобразователь напряжения AC/DC (блок питания) или аккумуляторной батареей. Преобразователь напряжения подключается посредством разъема 2.1 мм с центральным положительным полюсом. Провода от батареи подключаются к выводам Gnd и Vin разъема питания.
Платформа может работать при внешнем питании от 6 В до 20 В. При напряжении питания ниже 7 В, вывод 5V может выдавать менее 5 В, при этом платформа может работать нестабильно. При использовании напряжения выше 12 В регулятор напряжения может перегреться и повредить плату. Рекомендуемый диапазон от 7 В до 12 В.
Выводы питания:
VIN. Вход используется для подачи питания от внешнего источника. Подача напряжения питания происходит через данный вывод.
5V. Регулируемый источник напряжения, используемый для питания микроконтроллера и компонентов на плате. Питание может подаваться от вывода VIN через регулятор напряжения, или от разъема USB, или другого регулируемого источника напряжения 5 В.
3V3. Напряжение на выводе 3.3 В генерируемое встроенным регулятором на плате. Максимальное потребление тока 50 мА.
GND. Выводы заземления.
Входы и выходы
Каждый из 14 цифровых выводов Uno может настроен как вход или выход, используя функции pinMode(), digitalWrite(), иdigitalRead(), . Выводы работают при напряжении 5 В. Каждый вывод имеет нагрузочный резистор (по умолчанию отключен) 20-50 кОм и может пропускать до 40 мА. Некоторые выводы имеют особые функции:
Последовательная шина: 0 (RX) и 1 (TX). Выводы используются для получения (RX) и передачи (TX) данных TTL. Данные выводы подключены к соответствующим выводам микросхемы последовательной шины ATmega8U2 USB-to-TTL.
Внешнее прерывание: 2 и 3. Данные выводы могут быть сконфигурированы на вызов прерывания либо на младшем значении, либо на переднем или заднем фронте, или при изменении значения. Подробная информация находится в описании функции attachInterrupt().
ШИМ: 3, 5, 6, 9, 10, и 11. Любой из выводов обеспечивает ШИМ с разрешением 8 бит при помощи функцииanalogWrite().
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Посредством данных выводов осуществляется связь SPI, для чего используется библиотека SPI.
LED: 13. Встроенный светодиод, подключенный к цифровому выводу 13. Если значение на выводе имеет высокий потенциал, то светодиод горит.
На платформе Uno установлены 6 аналоговых входов (обозначенных как A0 .. A5), каждый разрешением 10 бит (т.е. может принимать 1024 различных значения). Стандартно выводы имеют диапазон измерения до 5 В относительно земли, тем не менее имеется возможность изменить верхний предел посредством вывода AREF и функции analogReference(). Некоторые выводы имеют дополнительные функции:
I2C: 4 (SDA) и 5 (SCL). Посредством выводов осуществляется связь I2C (TWI), для создания которой используетсябиблиотека Wire.
Дополнительная пара выводов платформы:
AREF. Опорное напряжение для аналоговых входов. Используется с функцией analogReference().
Reset. Низкий уровень сигнала на выводе перезагружает микроконтроллер. Обычно применяется для подключения кнопки перезагрузки на плате расширения, закрывающей доступ к кнопке на самой плате Arduino.
Обратите внимание на соединение между выводами Arduino и портами ATmega328.
Связь
На платформе Arduino Uno установлено несколько устройств для осуществления связи с компьютером, другими устройствами Arduino или микроконтроллерами. ATmega328 поддерживают последовательный интерфейс UART TTL (5 В), осуществляемый выводами 0 (RX) и 1 (TX). Установленная на плате микросхема ATmega8U2 направляет данный интерфейс через USB, программы на стороне компьютера "общаются" с платой через виртуальный COM порт. Прошивка ATmega8U2 использует стандартные драйвера USB COM, никаких стороних драйверов не требуется, но на Windows для подключения потребуется файл ArduinoUNO.inf. Мониторинг последовательной шины (Serial Monitor) программы Arduino позволяет посылать и получать текстовые данные при подключении к платформе. Светодиоды RX и TX на платформе будут мигать при передаче данных через микросхему FTDI или USB подключение (но не при использовании последовательной передачи через выводы 0 и 1).
Библиотекой SoftwareSerial возможно создать последовательную передачу данных через любой из цифровых выводов Uno.
ATmega328 поддерживает интерфейсы I2C (TWI) и SPI. В Arduino включена библиотека Wire для удобства использования шины I2C.
Программирование
Платформа программируется посредством ПО Arduino. Из меню Tools > Board выбирается «Arduino Uno» (согласно установленному микроконтроллеру). Подробная информация находится в справочнике и инструкциях.
Микроконтроллер ATmega328 поставляется с записанным загрузчиком, облегчающим запись новых программ без использования внешних программаторов. Связь осуществляется оригинальным протоколом STK500.
Имеется возможность не использовать загрузчик и запрограммировать микроконтроллер через выводы ICSP (внутрисхемное программирование). Подробная информация находится в данной инструкции.
Автоматическая (программная) перезагрузка
Uno разработана таким образом, чтобы перед записью нового кода перезагрузка осуществлялась самой программой Arduino на компьютере, а не нажатием кнопки на платформе. Одна из линий DTR микросхемы ATmega8U2, управляющих потоком данных (DTR), подключена к выводу перезагрузки микроконтроллеру ATmega328 через 100 нФ конденсатор. Активация данной линии, т.е. подача сигнала низкого уровня, перезагружает микроконтроллер. Программа Arduino, используя данную функцию, загружает код одним нажатием кнопки Upload в самой среде программирования. Подача сигнала низкого уровня по линии DTR скоординирована с началом записи кода, что сокращает таймаут загрузчика.
Функция имеет еще одно применение. Перезагрузка Uno происходит каждый раз при подключении к программе Arduino на компьютере с ОС Mac X или Linux (через USB). Следующие полсекунды после перезагрузки работает загрузчик. Во время программирования происходит задержка нескольких первых байтов кода во избежание получения платформой некорректных данных (всех, кроме кода новой программы). Если производится разовая отладка скетча, записанного в платформу, или ввод каких-либо других данных при первом запуске, необходимо убедиться, что программа на компьютере ожидает в течение секунды перед передачей данных.
На Uno имеется возможность отключить линию автоматической перезагрузки разрывом соответствующей линии. Контакты микросхем с обоих концов линии могут быть соединены с целью восстановления. Линия маркирована «RESET-EN». Отключить автоматическую перезагрузку также возможно подключив резистор 110 Ом между источником 5 В и данной линией.
Токовая защита разъема USB
В Arduino Uno встроен самовостанавливающийся предохранитель (автомат), защищающий порт USB компьютера от токов короткого замыкания и сверхтоков. Хотя практически все компьютеры имеют подобную защиту, тем не менее, данный предохранитель обеспечивает дополнительный барьер. Предохранитель срабатывает при прохождении тока более 500 мА через USB порт и размыкает цепь до тех пока нормальные значения токов не будут восстановлены.
Сервопривод (следящий привод) – привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения.
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
Сервопривод состоит из следующих элементов:
привод — например, электромотор с редуктором, или пневмоцилиндр,
датчик обратной связи — например, датчик угла поворота выходного вала редуктора (энкодер),
блок питания и управления (он же преобразователь частоты / сервоусилитель / инвертор / servodrive),
вход/конвертер/датчик управляющего сигнала/воздействия (может быть в составе блока управления).
Простейший блок управления электрического сервопривода может быть построен на схеме сравнения значений датчика обратной связи и задаваемого значения, с подачей напряжения соответствующей полярности (через реле) на электродвигатель. Более сложные схемы (на микропроцессорах) могут учитывать инерцию приводимого элемента и реализовывать плавный разгон и торможение электродвигателем для уменьшения динамических нагрузок и более точного позиционирования (например, привод головок в современных жёстких дисках).
Для управления сервоприводами или группами сервоприводов можно использовать специальные ЧПУ-контроллеры, которые можно построить на базе программируемых логических контроллеров.
Мощность двигателей: от 0,05 до 15 кВт.
Крутящие моменты (номинальные): от 0,15 до 50 Н·м и более.
Гироскоп представляет собой устройство, реагирующее на изменение углов ориентации контролируемого тела. В классическом представлении это какой-то инерционный предмет, который быстро вращается на подвесах. Как результат вращающийся предмет всегда будет сохранять свое направление, а по положению подвесов можно определить угол отклонения. На самом же деле электронные гироскопы построены по другой схеме и устроены немного сложнее (вращающийся волчок впихнуть в микросхему было бы не просто). Акселерометр - это устройство, которое измеряет проекцию кажущегося ускорения, то есть разницы между истинным ускорением объекта и гравитационным ускорением. На простом примере такая система представляет собой некоторую массу, закрепленную на подвесе, обладающим упругостью (пружина для хорошего примера). Так вот если такую систему повернуть под каким-то углом, или бросить, или предать линейное ускорение, то упругий подвес отреагирует на движение под действием массы и отклонится и вот по этому отклонению определяется ускорение. Таким образом, гироскоп реагирует на изменение в пространстве независимо от направление движения, с помощью акселерометра же может измерять линейные ускорения предмета, а так же и искусственно рассчитываемое расположение предмета в пространстве. Каждое устройство имеет свои достоинства и недостатки.
Микросхема MPU6050 содержит на борту как акселерометр, так и гироскоп, а помимо этого еще и температурный сенсор. MPU6050 является главным элементом модуля GY-531. Помимо этой микросхемы на плате модуля расположена необходимая обвязка MPU6050, в том числе подтягивающие резисторы интерфейса I2C, а также стабилизатор напряжения на 3,3 вольта с малым падением напряжения (при питании уже в 3,3 вольта на выходе стабилизатора будет 3 ровно вольта) с фильтрующими конденсаторами. Ну и бонусом на плате распаян SMD светодиод с ограничивающим резистором как индикатор питающего напряжения. Размер платы модуля GY-521 10 х 20 мм.
Схема модуля представлена на рис. 15.

Рисунок 15. Схема модуля гироскопа GY-521
Характеристики MPU6050:
напряжения питания 2,375 - 3,46 вольт ;
потребляемый ток до 4 мА;
интерфейс передачи данных - I2C;
максимальная скорость I2C - 400 кГц;
вход для других датчиков I2C;
внутренний генератор на 8 МГц (вне модуля возможность подключить внешний кварцевый резонатор на 32,768 кГц или 19,2 МГц).
Нужно отметить возможность MPU6050 работать в мастер режиме I2C для AUX выводов, к которым можно подключить еще один внешний датчик (например, магнитометр). Функции MPU6050:
трех осевой MEMS гироскоп с 16 битным АЦП;
трех осевой MEMS акселерометр с 16-битным АЦП;
Digital Motion Processor (DMP);
slave I2C для подключения к микроконтроллеру;
master I2C для подключения к микросхеме дополнительного датчика;
регистры данных датчиков;
FIFO;
прерывания;
температурный сенсор;
самопроверка гироскопа и акселерометра;
регистр идентификации устройства.
Таким образом, мы просмотрели технические характеристики наших элементов. Можно приступать к сборке электронных схем в среде Proteus 7. Для начала создадим новый проект. Для этого нажимаем File->New Design.., перед вами откроется окно, которая показана на рисунке 12. В этом окне надо выбрать тип проекта и размер рабочей области.

Рис.16. Proteus 7. Создание нового проекта.
После нажатия на кнопку ОК перед вами откроется пустая форма на котором нет ни одного элемента. Чтобы на экране появились элементы необходимые для проекта ихч необходимо добавить. Для выбора компонентов нужно нажать на кнопку "P" в левом верхнем углу экрана (возле надписи "DEVICES") (Рисунок 13).

Рис.17. Выбор элементов
После нажатия на кнопку появится окно, где содержатся множество компонентов (рисунок 14). В столбце слева находятся классификация элементов, в столбце посередине сами элементы, в левом нижнем "окошке" - корпус элемента (если таковой имеется в библиотеке ARIES), а в правом верхнем окне собственно сами элементы. Если не можете найти элемент, то можно воспользоваться функцией поиска. Для этого просто надо набрать в поле полное или частичное название искомого элемента, расположенную в верхнем левом углу и выбрать среди выданных результатов нужный вариант.
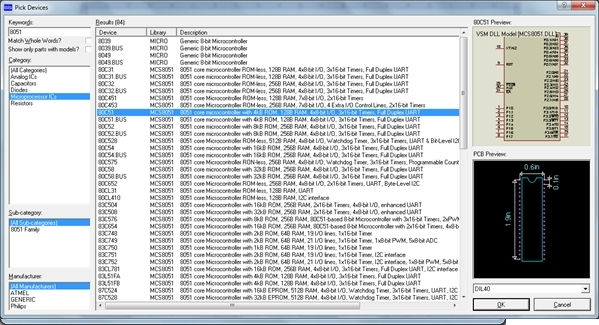
Рис.18. Окно компонентов.
В окне компонентов выбираем необходимые для сборки электронной схемы элементы. После чего окно компонентов можно закрыть. В итоге в поле компонентов появится выбранные нами компоненты и можно приступить к сборке электронной схемы. Компоненты выставляются в необходимых местах, и остается только соединить контакты. Для соединения наводится стрелкой на контакт и двойным кликом выставляется начало соединение. Мышкой наводится на другой контакт и двойным кликом фиксируем соединение. В итоге по окончанию соединение всех компонентов получаем электронную схему. Питание микроконтроллеру подключается по умолчанию. В таком случаи не приходится подключать питание к контроллеру. Для добавление питания и земли в схему, в панели надо нажать на кнопку Terminals Mode вследствие чего в панели элементов появится терминалы (рисунок 15). В элементах выбираем элементы POWER и GROUND и добавляются на разрабатываемую схему.

Рис. 19. Добавление в проект терминалов
С "GROUND" все понятно – это корпус ("земля"), а вот "POWER" еще нужно выбрать. Выбор шины питания производится уже после перетаскивания значка питания или заземления на "рабочее поле", так для микросхем нужно выбрать "Правка свойств - Строка- VCC", а для КМОП-тоже самое, но VDD, GND не трогаем, он уже установлен "по умолчанию". То, что перечислено выше справедливо, если при моделировании выбирается в качество источника питания - батарея, если же просто хотим просмотреть работу микросхем или блоков на них, то источник можно не указывать, он как бы встроен внутрь этого мистического "синего прямоугольника". Теперь, зная как установить питание и некоторые особенности моделирования можно приступить к последнему, сборке схеме.
Итогом сборки учебного пример приведена на рисунке 16.
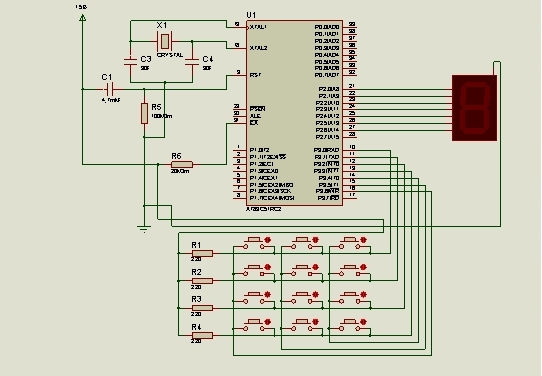
Рис.20. Электронная схема учебного примера.
И так с первым примером разобрались. Для того чтоб собрать вторую схему в библиотеке Proteus-а нету некоторых компонентов. Как выйти из такой ситуации? В программе Proteus есть возможность создание компонента. Разработку модели условно можно разделить на два этапа - рисование ее графической части, отображаемой на экране и создание программного кода.
Разработка графической части модели Proteus. Создаем новый проект в протеусе. Потом на панели инструментов в левой части окна, нажимаем на кнопку с изображением зеленного квадратика. После чего переведя указатель мышки на рабочее поле и нажав на левую кнопку, рисуем квадрат или прямоугольник, который будет основой изображения модели (Рисунок21).

Рис. 21. Разработка элемента
Добавляются линии (необязательно) и букву G, обозначающий, что это генератор (необязательно).после чего добавляются выводы к модели, с помощью которых она будет "общаться" с остальной схемой (рисунок 22).
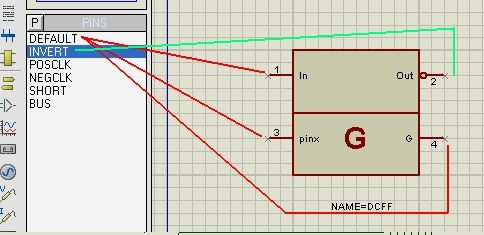
Рис.22. Добавление выводов к модели
Вывод с обозначением инвертирования только для обозначения данного факта. Будет сигнал проинвертирован или нет, зависит от программного кода модели.
На рисунке 23 можно увидеть, что выводы пронумерованы и им присвоены имена, но при их добавлении этого нет. Чтобы добавить эту информацию, нужно дважды кликнуть лавой кнопкой мышки по выводу и в окне задать данные (имя, номер и направление вывода, вход или выход). При этом надо учесть, что имя используется для идентификации вывода в коде модели и если задать имена, отличающиеся от тех, что на рисунке 23, понадобится вносить изменения в код модели. Выводы слева необходимо настроить как входы, а справа, как выходы.

Рис.23. Обозначение выводов элемента.
Теперь можно добавим описание модели. Для добавление скрипта в панели инструментов нажимается на кнопку Text Script Mode, в проявившем окне пишем описание элемента. В параметре MODDLL должен быть указан имя DLL-библиотеки с программным кодом модели.
{*DEVICE}
NAME=TestModel
{PREFIX=DD}
{*PROPDEFS}
{MODDLL="VSM Model DLL",HIDDEN STRING}
{PRIMITIVE="PrimitiveType",HIDDEN STRING}
{*COMPONENT}
{MODDLL=TestModel.dll}
{PRIMITIVE=DIGITAL,TestModel}
Теперь графическую часть модели можно считать созданной и ее можно добавить в библиотеку Proteus. Для этого следует мышкой выделить модель и ее скрипт описания и в меню "Library" кликнуть по пункту "Make Device".
Таким образом, создаем элементы недостающие для нашего устройства и сохраняем их в библиотеку. Получив все компоненты, собирается электронная схема устройства, которая представлена на рисунке 24.
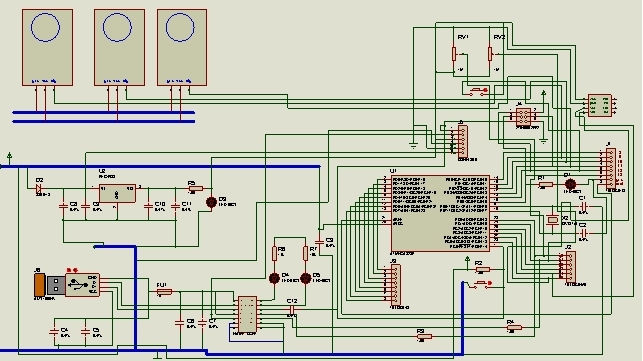
Рис.24. Электронная схема стабилизирующего устройства.
Собрав электронные схемы можно приступать к следующим этапам проектирования.
Комментарии